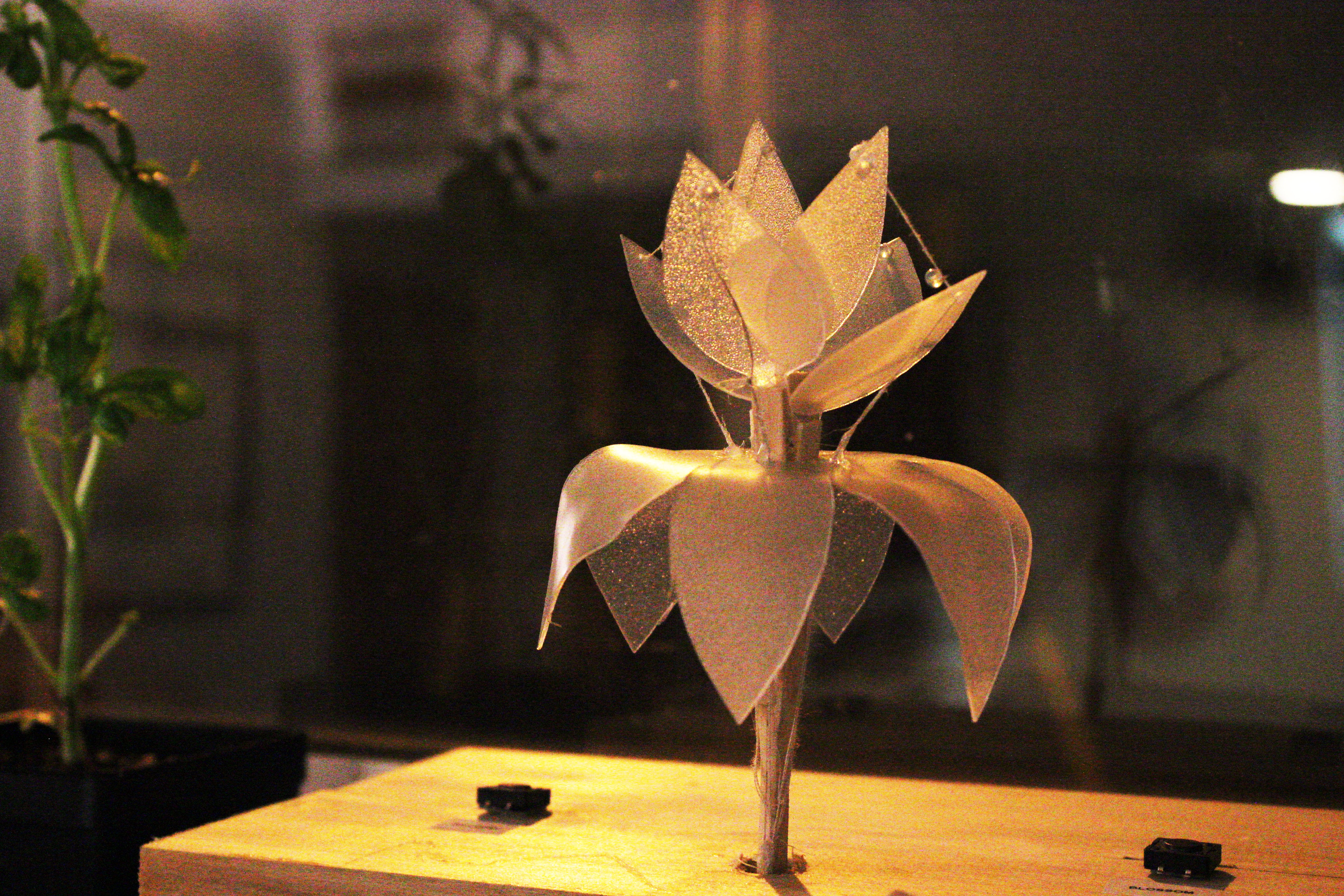
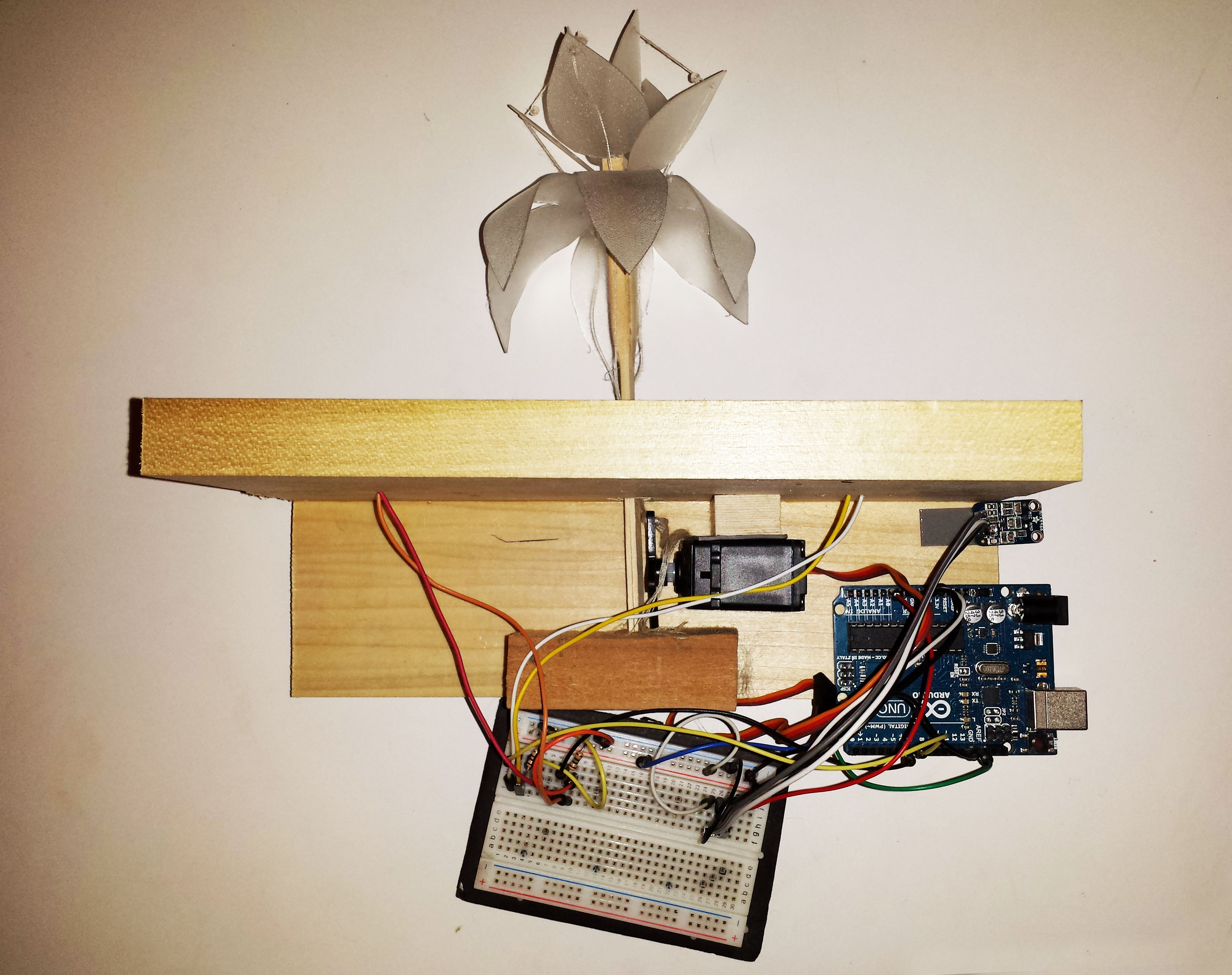
This was my first time taking the quick and dirty route to making a 'robot'. The point of this project was to get me acquainted with sound input and interpretation. Quite simply, using the fft library I was able to gather the pitch of the sound being taken into a microphone and then save it. After being saved, other audio inputs will be compared by pitch and length, and if the sound is similar enough within a tolerance the flower will move. I really liked the idea of having this be very "puppeted" and playful and obviously fake, hence the aesthetic affect of strings, clear plastic, and wood.